Bridging the Gap Between Vision and Reality
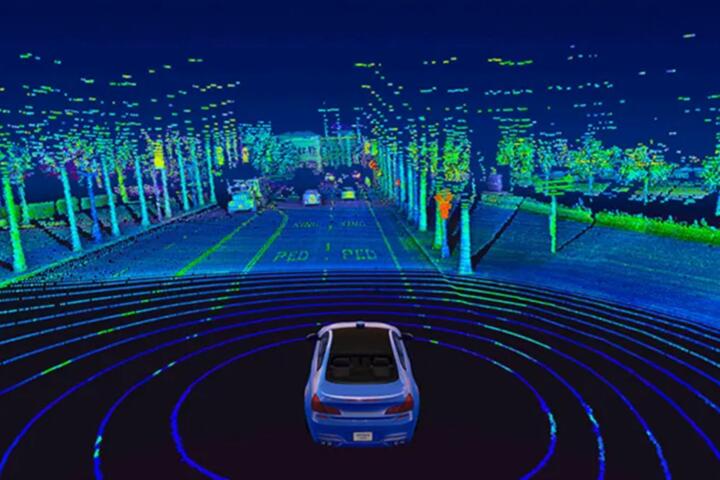
For years, the Achilles' heel of autonomous driving has been atmospheric interference. While standard LiDAR (Light Detection and Ranging) provides an incredible 3D point cloud of the environment, traditional Time-of-Flight (ToF) systems often struggle when a photon hits a snowflake instead of a pedestrian. When we talk about "Next-Gen" sensors, we are referring to a fundamental shift in how light is emitted, received, and interpreted to filter out environmental noise.
In a practical sense, imagine an autonomous truck navigating the I-80 through a Wyoming blizzard. A first-generation sensor might perceive the thick snowfall as a solid wall, triggering a "phantom brake" event. Modern systems, however, use multi-echo technology and sophisticated wave analysis to "see through" the flakes, identifying the actual road boundary and surrounding vehicles with centimeter-level precision.
The stakes are high. According to data from the Federal Highway Administration, roughly 21% of all vehicle crashes in the U.S. are weather-related. For self-driving systems to gain public trust and regulatory approval, they must demonstrate a Disengagement per Mile (DPM) rate that remains stable even when the sun goes down and the clouds open up.
The Critical Weakness of Legacy Optical Systems
The primary failure point in early LiDAR deployments was the reliance on 905nm (nanometer) wavelengths. These systems are limited in power because higher intensity at 905nm can damage the human retina. Consequently, their range is often capped at 150–200 meters in perfect conditions, a distance that shrinks drastically to less than 50 meters in heavy fog.
Another pain point is the "Ghost Object" phenomenon. In heavy rain, water droplets on the sensor lens or in the air create backscatter. The sensor receives a reflection from the rain, interprets it as a physical obstacle, and forces the vehicle to stop. This lack of reliability leads to "autonomy downtime," where the vehicle hands control back to the human driver precisely when the human is most stressed by the weather.
The industry has also struggled with mechanical reliability. Traditional spinning LiDARs involve moving parts that are prone to wear and calibration drift when subjected to the constant vibrations of a vehicle on a rough road. This mechanical fragility, combined with optical sensitivity, created a bottleneck for mass-market adoption.
Technological Solutions for Adverse Weather Performance
Transitioning to 1550nm Fiber Lasers
The move from 905nm to 1550nm wavelengths is a game-changer. At 1550nm, the light is "eye-safe" because it is absorbed by the cornea before reaching the retina. This allows manufacturers like Luminar to use significantly higher pulse power. In practice, this means the sensor can penetrate through mist and spray that would completely obscure a lower-power laser. A 1550nm system can maintain a 250-meter range even with 10% reflectivity targets in suboptimal light.
Frequency Modulated Continuous Wave (FMCW)
FMCW is the most significant leap in detection logic. Unlike ToF, which measures the time a pulse takes to return, FMCW sends a continuous stream of light and measures the frequency shift. Companies like Aeva and Mobileye are pioneering this. Because it measures the Doppler effect, it provides instantaneous velocity for every single pixel. This allows the software to instantly distinguish between a stationary snowbank and a moving vehicle, even if the visual clarity is poor.
Solid-State and MEMS Integration
Removing moving parts is essential for durability. Micro-Electro-Mechanical Systems (MEMS) use tiny mirrors to steer the laser beam. Brands like Innovaiz utilize this to create high-resolution grids without the bulk of a spinning turret. This design allows for better thermal management and easier integration into the vehicle’s chassis, such as behind the windshield, where the wipers can keep the sensor’s "field of vision" clear.
Advanced Perception Software and Filtering
Next-gen hardware is only half the battle. Software stacks now utilize "Atmospheric Filtering" algorithms. By analyzing the "width" of a returning pulse, the system can determine if the reflection came from a hard surface (a car) or a soft, dispersed medium (fog). AEye’s software-definable LiDAR allows the sensor to dynamically increase "dwell time" on specific objects of interest, effectively "staring" through the rain to confirm a detection.
Multi-Echo Capability
Modern sensors don't just record the first reflection. They record multiple "returns" from a single laser pulse. If a pulse hits a raindrop and then a car, the sensor captures both. The perception engine then discards the first, weaker return (the rain) and keeps the second (the car). This redundancy is what allows a Volvo equipped with integrated LiDAR to maintain high-speed highway pilot functions in drizzling conditions.
Real-World Performance Benchmarks
Case Study 1: Long-Haul Trucking in the Midwest
A leading logistics firm integrated Luminar Iris sensors into their Class-8 autonomous trucks. During a late-autumn trial involving heavy sleet and "road spray" (the mist kicked up by other trucks), the system maintained a consistent 200-meter detection buffer. By utilizing the 1550nm wavelength, the truck was able to identify a stalled vehicle on the shoulder 4 seconds earlier than a human driver could visually confirm it through the spray.
Case Study 2: Urban Robotaxi Deployment
A European robotaxi startup switched from mechanical 905nm units to Ouster’s digital LiDAR for their fleet. They reported a 40% reduction in "phantom braking" incidents during the rainy season. The digital architecture allowed for better "blooming" suppression—where bright reflections from wet pavement would previously blind the sensor—resulting in a 15% increase in operational uptime during inclement weather.
Comparing Optical Architectures for Weather Resilience
| Feature | Standard ToF (905nm) | High-Power ToF (1550nm) | FMCW (Doppler LiDAR) |
|---|---|---|---|
| Max Range | 150m - 200m | 250m - 500m | 300m+ |
| Fog Penetration | Poor | Good | Excellent |
| Velocity Sensing | Calculated (Latency) | Calculated (Latency) | Instantaneous (No Latency) |
| Eye Safety | Restricted Power | High Power Allowed | High Power Allowed |
| Interference Risk | High (from other cars) | Moderate | Zero (Encoded signal) |
| Cost Scale | Lowest | High | Highest |
Common Implementation Errors to Avoid
A frequent mistake is placing the LiDAR unit too low on the vehicle. While a bumper mount looks sleek, it subjects the sensor to the maximum amount of road salt, mud, and water splash. For optimal weather performance, roof mounting is superior. It provides a better "look-down" angle and keeps the optics further from the ground-level debris.
Another error is neglecting the cleaning system. Even the most advanced 1550nm laser cannot see through a thick layer of dried mud. Effective deployments must include a high-pressure liquid nozzle or an air-blast system integrated into the vehicle's washer fluid line. Companies like Waymo have patented sophisticated mechanical wipers and thermal heaters for their sensor domes to prevent ice buildup.
Finally, developers often fail to calibrate for "dark-object" detection in wet conditions. Wet asphalt has a much lower reflectivity than dry asphalt. If your perception threshold is set too high, the road surface might "disappear" in the point cloud during a storm. Calibration must be dynamic, adjusting the gain based on ambient moisture sensors.
FAQ
Can LiDAR see through dense fog better than a camera?
Yes. While cameras rely on ambient light and contrast (which disappear in fog), LiDAR provides its own light source. Next-gen 1550nm and FMCW sensors can penetrate fog by filtering out backscatter and using high-intensity pulses that cameras cannot replicate.
Is FMCW LiDAR worth the extra cost?
For Level 4/5 autonomous systems, yes. The ability to instantly know the velocity of every object without needing multiple frames of data is a massive safety redundant that simplifies the software's job in chaotic weather.
How do these sensors handle heavy snow?
Snowflakes are highly reflective. Next-gen sensors use multi-echo technology to ignore the first few reflections (the snow) and focus on the final, strongest reflection (the solid object behind the snow).
Do these sensors interfere with each other on the road?
Standard ToF sensors can occasionally "confuse" another car's laser pulse for their own. However, FMCW sensors use a unique frequency modulation that acts like a digital signature, making them virtually immune to interference.
Are there moving parts in modern LiDAR?
The industry is moving toward "Solid-State" designs. While some use MEMS (tiny vibrating mirrors), many new sensors have no moving parts at all, which significantly increases their lifespan to over 100,000 hours of operation.
Author’s Insight
In my years tracking the evolution of spatial computing in the automotive sector, I've seen the conversation shift from "Can we see the road?" to "Can we trust what we see?" The jump to FMCW technology is the most significant milestone since the invention of the laser itself for automotive use. My practical advice for any fleet operator is this: don't chase the highest resolution (point density) alone. In the real world, signal-to-noise ratio in a rainstorm is far more valuable than a pretty 3D picture on a sunny day. If your hardware can't provide instantaneous velocity in a blizzard, you're essentially driving with one eye closed.
Conclusion
The transition to next-generation LiDAR is no longer a luxury—it is a prerequisite for all-weather autonomous safety. By moving toward 1550nm wavelengths and FMCW architectures, the automotive industry is solving the "blindness" that has plagued self-driving prototypes for a decade. For those looking to implement these technologies, the focus should be on a multi-layered approach: high-power hardware, multi-echo signal processing, and integrated cleaning hardware. Prioritizing these elements will ensure that the vehicles of tomorrow are not just smart, but resilient enough to handle the unpredictability of the open road.